

功能多元化的计算工具

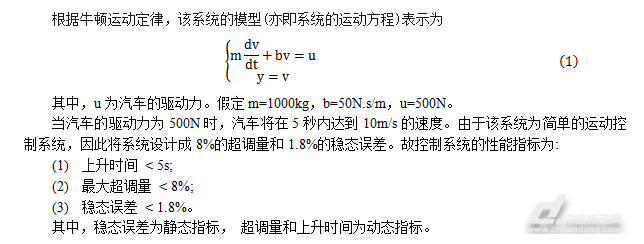
现今科技界存在一款功能卓越的工具,它擅长数值计算、优化处理、统计分析等,还能进行图形展示。此工具在自动控制、信号处理、图像识别等关键领域大显身手,极大地便利了科研工作者和工程师。比如,在航天领域,借助此工具对飞行器的控制算法进行数值模拟,就能精确预测出最优飞行路径。
电机控制的理论与现实困境

从理论上讲,众多控制方法能够让电机表现出优异的动态和静态性能。然而,在实际操作中,问题随之而来。算法本身的复杂性,再加上对系统模型进行识别的难度,导致这些理论方法在实际系统中难以实施。以某些工业生产线的电机控制系统为例,由于算法复杂,控制精度难以保证。
传统PID控制器的原理
传统的PID控制器拥有自己特定的数学模型。在这个模型中,误差信号e(t)是控制器接收的输入。控制器通过数据采样来执行控制任务,输入信号在进入控制器前需经过采样和量化处理,转换成数字信号。这个过程就像是将信息翻译成控制器能够理解的语言,之后它才能正常运行。
数字PID控制器的实现方式
在数字PID控制器中,若要实现PID的控制原则,必须使用数值逼近技术。当采样周期较短时,积分功能由求和来替代,微分功能由差商来替代,这样就将PID控制算法转化为离散形式,进而形成了数字PID位置型控制算法。这种算法中,u(k)代表在第k个采样周期内PID的输出,而e(k)则代表在第k个采样周期内系统的误差。
系统响应曲线分析

从系统初始状态入手,运用串联校正法则和参数变动对系统反应特性的影响进行解析,静态与动态性能指标得以评估,这对我们构建理想的控制体系大有裨益。借助MATLAB脚本绘制系统初始阶跃响应曲线,结果显示系统开环响应未出现振荡,呈现过阻尼特征,上升时间约为100秒,稳态误差高达98%,无法满足对设定值的跟踪需求。
PID控制在系统中的有效性
经过该设计验证,通常情况下,PID控制在一般控制系统中效果显著。通常无需深入探究被控对象的内部机制,只需根据Kp、Ki和Kd的参数特性以及MATLAB绘制的阶跃响应曲线进行设计即可。我们可以依据系统性能指标和调整参数的经验,进行不同PID参数的仿真实验,以确定合适的参数设置。
在实际运用PID控制时,我们可能会遇到哪些特别的问题?欢迎点赞、转发这篇文章,同时,也欢迎在评论区留下您的看法,一起讨论交流。
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请联系本站,一经查实,本站将立刻删除。如若转载,请注明出处:http://www.wanmatong.com/html/tiyuwenda/9774.html






